for i in *.JPG; do echo $i ; done > noms for i in *.JPG; do echo -n $i ; exiftool $i | grep atitu | grep -v R; done > latitude for i in *.JPG; do echo -n $i ; exiftool $i | grep ngitu | grep -v R; done > longitude for i in *.JPG; do echo -n $i ; exiftool $i | grep Altit | grep -v R; done > altitude cat latitude | cut -c 56-100 | cut -d\ -f1,3,4 | sed "s/'//g" | sed 's/"//g' > latitude.txt cat longitude | cut -c 56-100 | cut -d\ -f1,3,4 | sed "s/'//g" | sed 's/"//g' > longitude.txt cat altitude | cut -c 56- | cut -d\ -f1 > altitude.txt paste noms latitude.txt longitude.txt altitude.txtI sometimes have to tune the
56-100argument of cut depending on filename length and exiftool organization. The value (56) must be the index of the number value of interest (latitude, longitude or altitude).
Because WGS84 coordinates are in degree.second format and I want decimal degrees, I convert using GNU/Octave:
load latitude.txt l=latitude(:,1)+latitude(:,2)/60+latitude(:,3)/3600; save -text latitude.dec l load longitude.txt l=longitude(:,1)+longitude(:,2)/60+longitude(:,3)/3600; save -text longitude.dec land finally the resulting dataset needed for QGis is generated, after removing the GNU/Octave header from the .dec files, by combining all these columns in a single file
paste latitude.dec longitude.dec altitude.txt noms > for_qgis.txtIn QGis, I load the files using the comma-shaped icon, with latitude and longitude assigned respectively to the Y and X columns. Right click on the item in the item-list, Save As and select CRS WGS84-UTM33N (EPSG:32633). Save as positions_31N.csv and clean the resulting file from unwanted columns and comma separator with
cat positions_33N.csv | cut -d, -f1-2,5,6 | sed 's/,/ /g' | sed 's/^43//g' | sed 's/ 875/ /g' > positions_33N.finalFields 1-2,5,6 are longitude, latitude, altitude, filename, so I manually (vi) add the header
#F=X Y Z NIn my particular case, WGS84-UTM33N latitudes are around 8750000 and longitudes are around 430000 so I remove the leading 875 and 43 to match the region I work in and help Micmac's computation by preventing excessively large coordinates from being used. THIS MUST BE ADAPTED TO EACH REGION. I my case, some remaining coordinates might be left with 876xxxx so I also replace (sed) all
\ 876with
1.
mm3d OriConvert OriTxtInFile positions_33N.final jmfgps MTD1=1 NameCple=FileImagesNeighbour.xml CalcV=1 ImC=DJI_0115.JPG NbImC=25generates a FileImagesNeighbour.xml image pairs, and a PATC list which must be adapted to shell scripting (remove spaces around = and surround the list with double quotes).
I have no reason of trusting the image matching algorithm, so I want to assess how appropriate the use of the
picture GPS coordinates for identifying image pairs is. For that I wrote a couple of scripts for converting the image name
pairs to coordinate pairs and encapsulate the coordinate set into a
WKT file for QGis.
This is done first by
cat FileImagesNeighbour.xml | sed 's/I generate a script to be executed later by executing an awk script (named script.awk) containing//g' | sed 's/<\/Cple>//g' | grep -v S | grep -v x | sed 's/ //g' > imgpairs
{ print "sed 's/"$4"/43"$1" "875$2"/g' | \\" }
where p*final includes the coordinates we created earlier (it was called positions_33N.final):
cat p*final | awk -f script.awk > positions_31N.shIn the script positions_31N.sh, I replace the first line with cat imgpairs | \ and I remove in the last line the trailing | \. I finally execute this script to generate the wkt file to be loaded in QGis (using the coma-shaped icon):
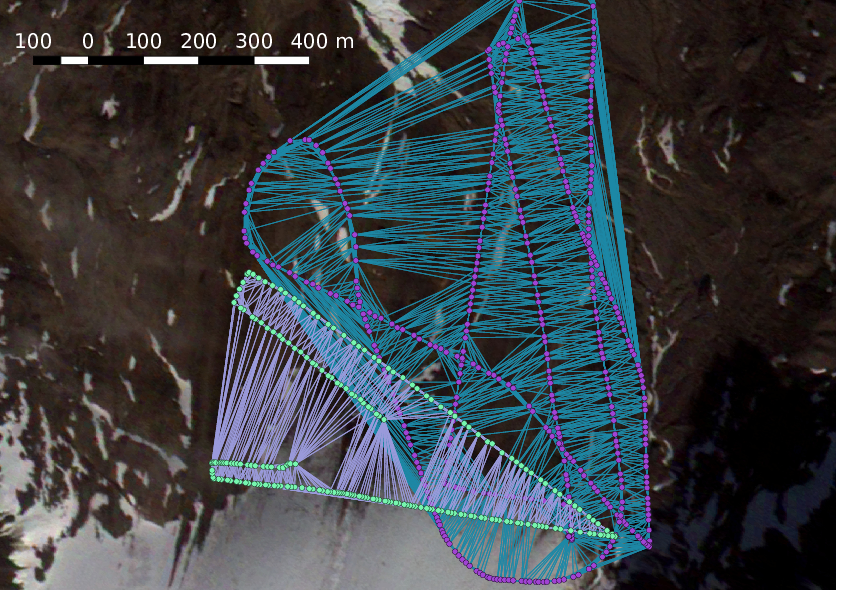
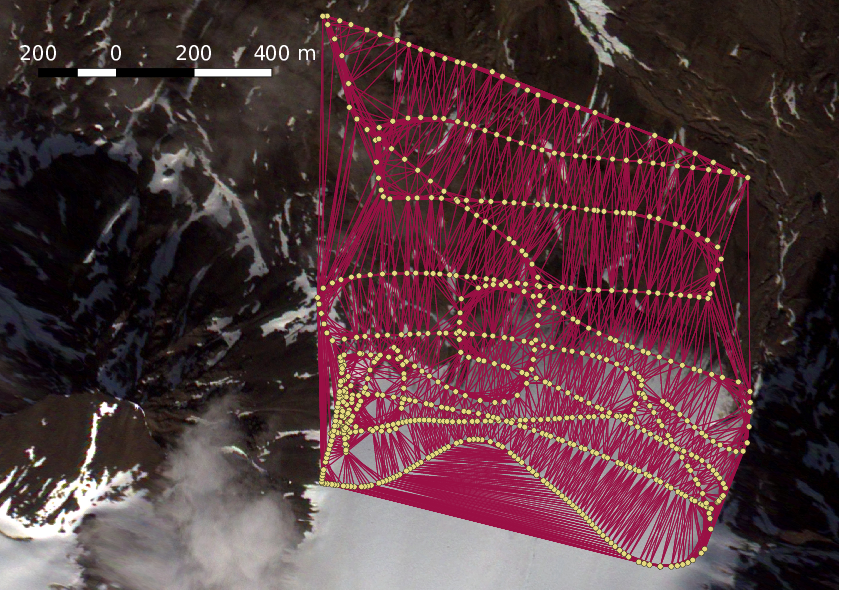
sh ./positions_31N.sh | sed 's/^/LINESTRING(/g' | sed 's/$/)/g' | sed 's/\ /,/2' > aida.wktThe result is for example the following image (for a couple of datasets):
PATC="DJI_0515.JPG|DJI_0514.JPG|DJI_0516.JPG|DJI_0172.JPG|DJI_0173.JPG|DJI_0517.JPG|DJI_0513.JPG|DJI_0171.JPG|DJI_0174.JPG|DJI_0170.JPG|DJI_0175.JPG|DJI_0518.JPG|DJI_0512.JPG|DJI_0169.JPG|DJI_0176.JPG|DJI_0428.JPG|DJI_0429.JPG|DJI_0168.JPG|DJI_0177.JPG|DJI_0511.JPG|DJI_0427.JPG|DJI_0430.JPG|DJI_0496.JPG|DJI_0495.JPG|DJI_0167.JPG" P=".*JPG"PATC might or might not be relevant, depending on the convergence of the camera model. Sometimes the camera lens model (Tapas) will not converge (residue = NaN) and I have to manually select a subset of the pictures better suited for lens characteristics characterization. I iterate on 20-image sequences until the RadiaStd model converges, usually with some success after the 3rd attempt at most ?!
mm3d Tapioca File "FileImagesNeighbour.xml" -1 mm3d Tapas RadialStd "$PATC" Out=Cal mm3d Tapas AutoCal "$P" InCal=Cal Out=Init CenterBascule "$P" Init jmfgps tmp mm3d AperiCloud "$P" tmpHere we check on the coarse point cloud that all camera positions are correct and that the coordinate system is coherent. If elevations are much more than 90 m or camera spacing much more than 10 m, then something was wrong in the coordinate extraction. If one camera is not in the UAV path, I throw away the associated picture.
mm3d Malt Ortho "$P" tmp "DirMEC=Resultats" UseTA=1 ZoomF=2 ZoomI=32 Purge=true AffineLast=false mm3d Tawny Ortho-Resultats/ RadiomEgal=0 Nuage2Ply Resultats/NuageImProf_STD-MALT_Etape_7.xml Attr="Ortho-Resultats/Ortho-Eg-Test-Redr.tif"results in the orthorectified images in Ortho-Resultats and the DEMs in Resultats.
- for the orthorectified image, we are only interested in
Ortho-Resultats/*edr*
: the TIF format is surely nice but huge, so I first convert all useful images to PNGfor i in Orth*/*Redr*.tif; do nom=`echo $i|sed 's/tif/png/g'`;convert $i $nom;done
and combine the resulting image in a single huge PNG orthorectified image since I do not know how to trivially compute the corner coordinates of the sub-frames (should be easy to compute ... homework).export MAGICK_TMPDIR=/home/jmfriedt/t montage -tile 1x2 -geometry +0+0 Ortho-Eg-Test-Redr_Tile_0_0.png Ortho-Eg-Test-Redr_Tile_0_1.png out.png
The TMPDIR is due to the fact that my 512 MB tmpfs /tmp directory is not large enough for the imagemagick processing. The tile order seems rationale from the imagemagick web page, but I still need a few trial and errors every time I combine the images to get them in the right position. This is a lengthy computation: in my case, the 210 JPG images acquired from the UAV generate a 14300x40500 pixel large, 251 MB PNG image.
The associated world file out.pngw0.045 0 0 -0.045 8839.62 10127.52
is appended with the offset coordinate of the corner we initially removed to help micmac's computation, resulting in0.045 0 0 -0.045 438839.62 8760127.52
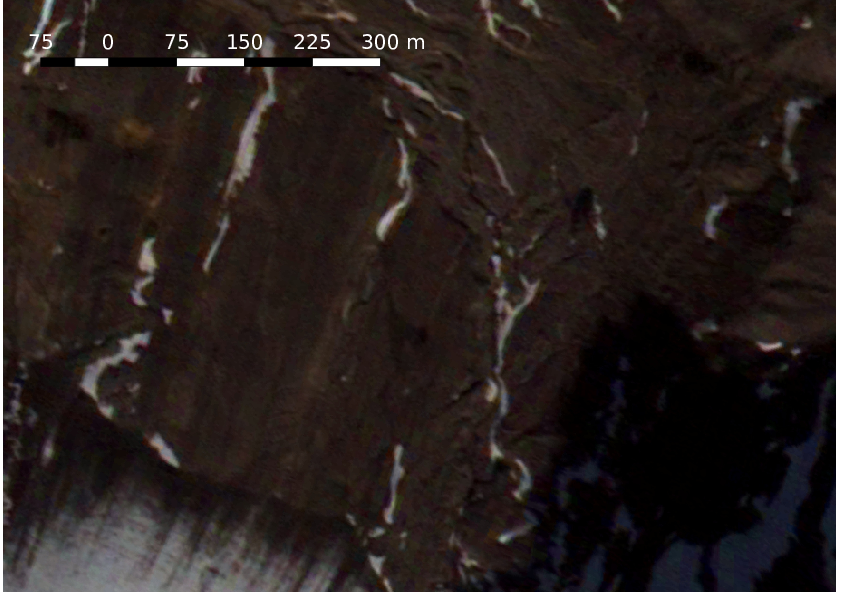
- We validate the orthoimage is properly located over a Formosat background reference image:
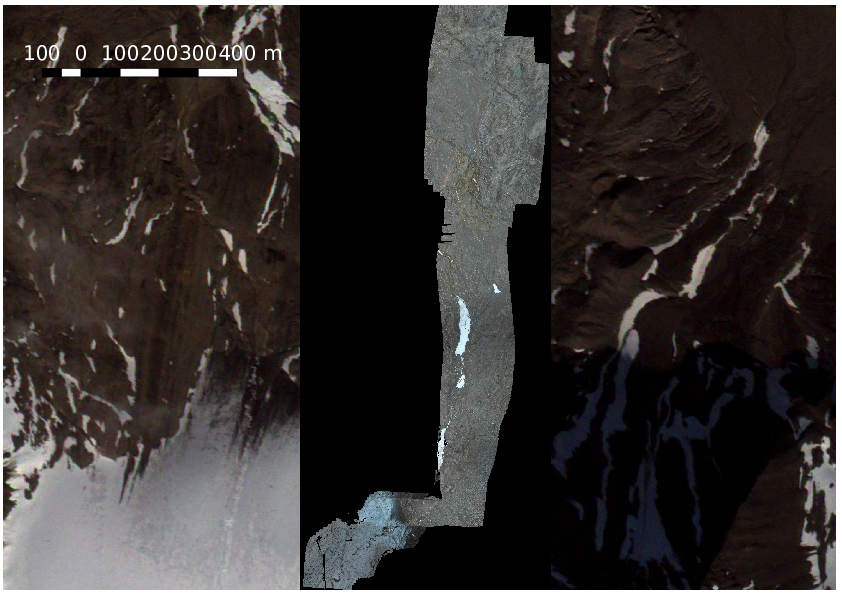
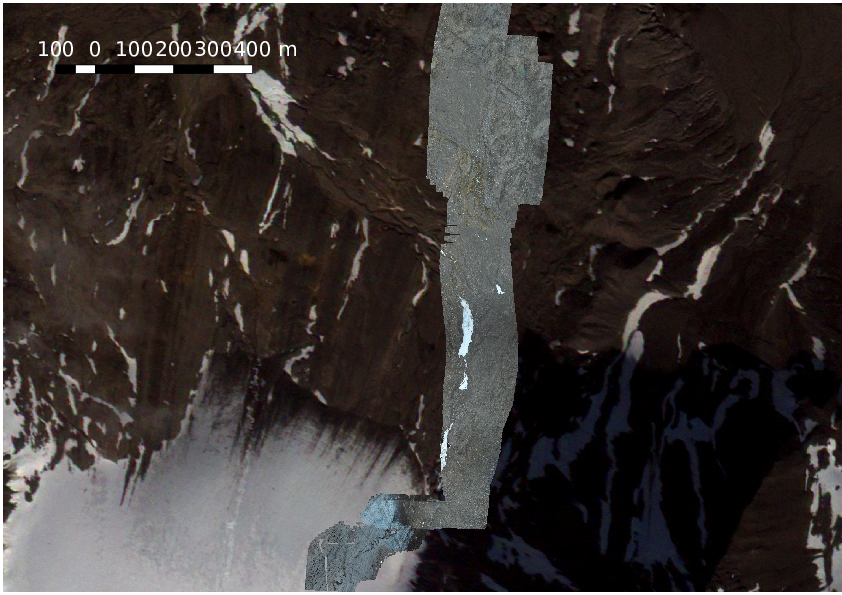
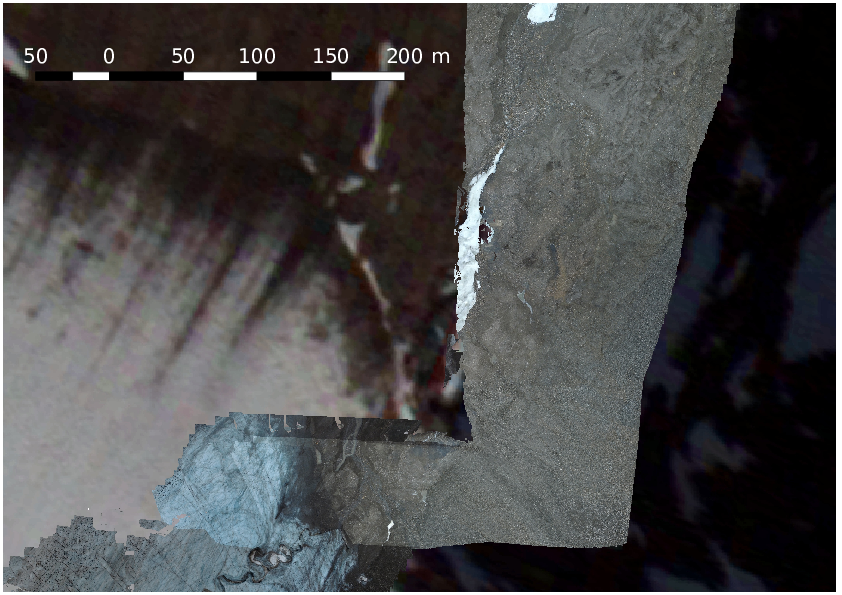
Left to right: raw raster orthophoto loaded with undefined areas in black -- undefined areas removed by defining the (0, 0, 0) color as transparent -- zoom on the glacier front and outgoing stream.
To remove the black background by converting it to a transparent layer, right click on the layer name in QGis, Properties - Transparency and "+" icon to add RGB=0 0 0 to the transparency list.
"Z_Num7_DeZoom2_STD-MALT@1"*0.09-9.36(since in my example the ResolutionAlti is 9 cm and OrigineAlti is -9.36 m).
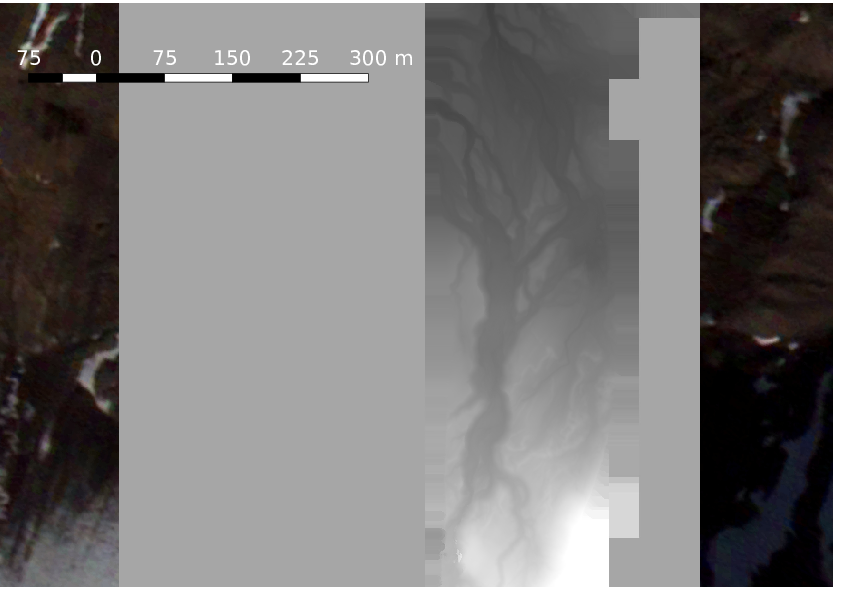
Left to right: raw formosat background image (taken in 2009), greyscale DEM overlay, colored DEM overlay
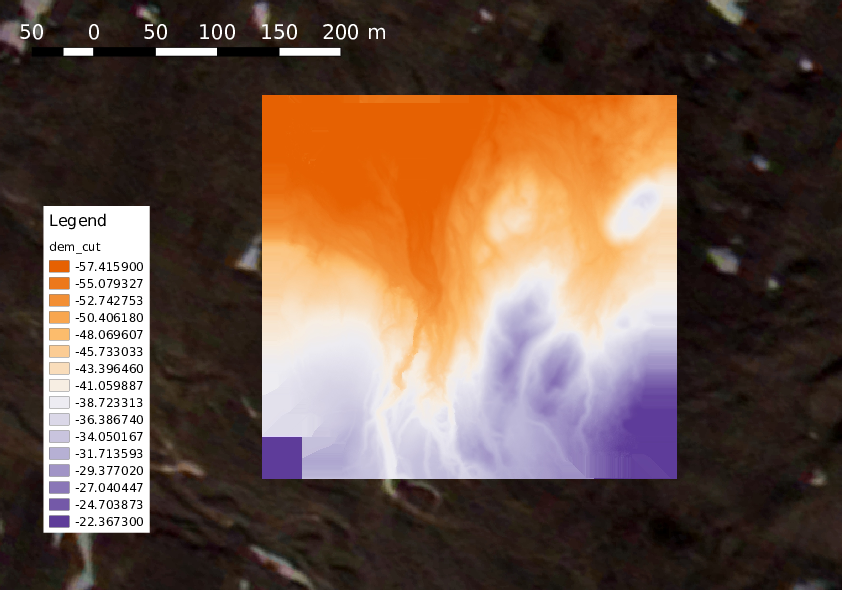
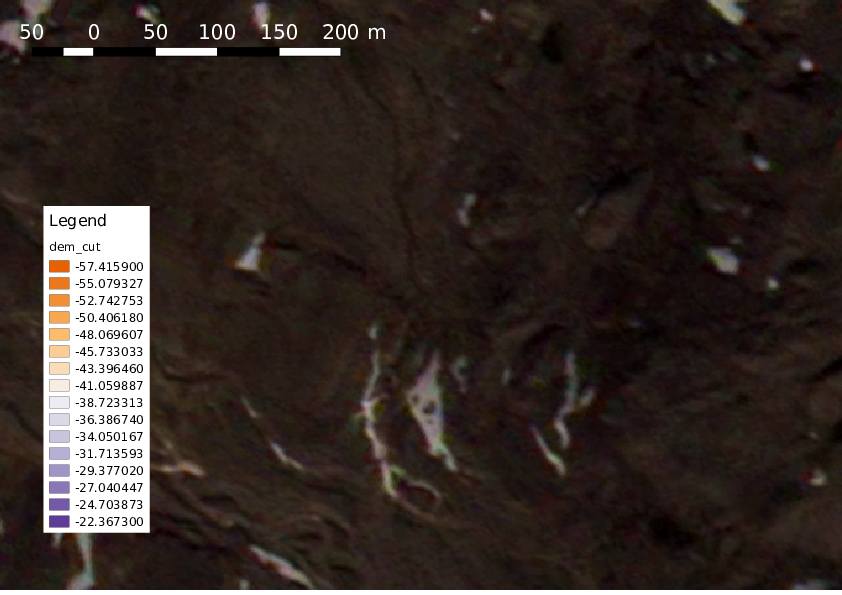
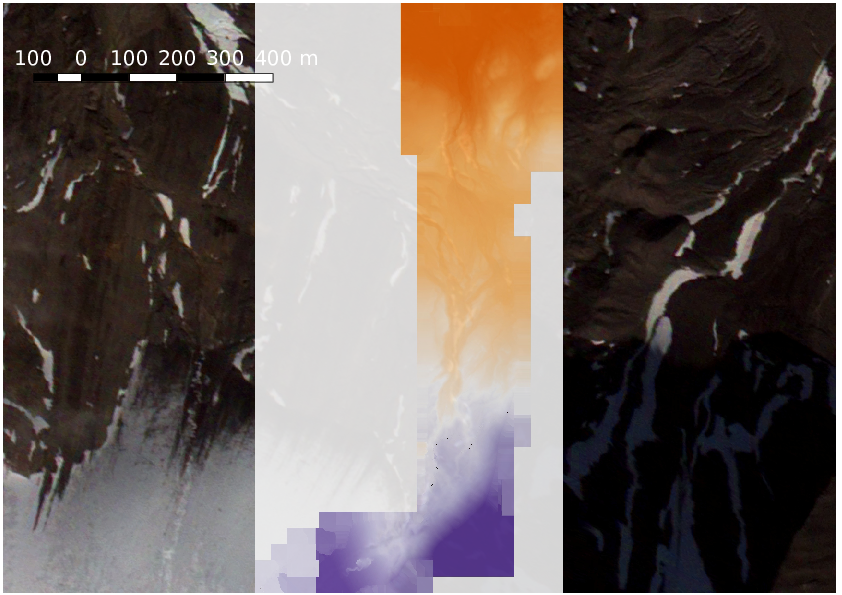
Left to right: cropped colored DEM, and raw background. Notice the hill on the top-right part of the DEM.

{kind=link}